
能效和机电一体化创意解决方案
以“技术中性”的出发点选择电驱动和气动是自动化领域获得成功的关键
发布时间:2013-10-30
用户经常过于匆忙地,仅仅根据经验来选择驱动装置——气动或电动。但是,为了找到最节能的自动化解决方案,需要进行技术中性比较。而这正是 Festo 用以为客户提供最高效机电一体化解决方案的方法。
用户经常过于匆忙地,仅仅根据经验来选择驱动装置——气动或电动。但是,为了找到最节能的自动化解决方案,需要进行技术中性比较。而这正是 Festo 用以为客户提供最高效机电一体化解决方案的方法。
采用工程软件 PositioningDrives,用户仅需几个关键数据即可获得正确的解决方案。哪个机电一体化线性驱动器能够最好地满足技术参数?只需输入位置值、有效载荷和安装位置,软件即可推荐最优化的解决方案。错误的尺寸或能源浪费将成为历史。
使用软件,确定正确尺寸
机械驱动器和传动元件及马达采用一个尺寸确定程序可避免安全系数的重复,这种重复可能造成电动驱动系统超尺寸及能源浪费。计算显示,统一使用 PositioningDrives 来确定尺寸,能源成本可节省高达 70%。
类似的 Festo 尺寸确定软件程序可帮助用户选择尺寸适当的气动驱动器。过大的气缸会不必要地消耗过多空气,而气缸过小则需要在最大允许压力下运行。高系统压力会造成资金浪费。在可能的地方尽量使用单作用气缸也可减少空气消耗。
系统节能
使用软件确定气动元件尺寸时,模拟操作替代了对整个气动控制链昂贵的实际测试。如果参数改变,程序会自动调整所有其他参数。当用户配置气动控制链时,程序确保所有系统元件的尺寸得到优化。这样就有可能减少压力损失、降低压力水平、缩小管件尺寸。较短的电缆和压缩空气管件也有助于节能。
Festo 可为搬运系统和控制技术创造能源优化解决方案。可直接安装且通过全面预测试的轻型搬运系统,如高速搬运单元三脚爪 EXPT 或高速 H 型门架 EXCH 可直接交付用户使用。该三脚爪重量轻,其杆件运动学元件和标准机电一体化元件以及超轻碳纤维杆,确保了驱动技术的高效利用。
高速解决方案
H 型门架具有所有门架设计中最富灵活的运动效果,X 轴和 Y 轴使用固定电机,确保运动件重量更轻。例如,在控制技术系统中,带联结中间电路的双电机控制器 CMMD-AS 实现了制动能量的回收。
理想组合的另一示例:电动齿带驱动轴 ELGA 确保高速行进,同时智能视觉系统 SBOI-Q 负责操作的精度。它确定实际操作点,并确保所传送货物的精确定位。一个典型应用示例是用于测试电子元件的预组装搬运系统,此应用必须快速而准确地控制大量测试地点。
摄像头用作控制器
但是,带抓手模块和待测试元件的轴怎样准确找到可用的测试地点呢?这就需要 Festo 的智能摄像头 SBOI-Q 发挥作用了,它通过集成的 PLC 控制电动搬运单元。摄像头根据参考数据分析实际位置的图像。它使用数据来计算搬运单元 X 轴和 Z 轴的正确位置。
摄像头 SBOI-Q 安装在电动悬臂搬运单元的前端。由于集成的 CoDeSys PLC 带 CANopen 主控功能,它能够完全控制搬运单元。无需额外的控制设备,因此,整个系统较为简单,与主轴相比,也更为迅速更为便宜。
成功的组合
客户的搬运任务决定了解决方案的形式——无论采用哪种驱动器。Festo 的专家利用公司超过 30,000 项的整个产品系列来选择最佳的驱动解决方案——伺服气动、电动或气动——以技术中性为基础。我们的工作原则是“能效乘以机电一体化等于成功”。这一公式是 Festo 创意解决方案的成果——高效、安全而简单。

图片说明:能源成本节省高达 70% :数据显示,统一使用 PositioningDrives 来确定尺寸,电驱动系统能效非常高。此处显示的是高速 T 型门架。(图片来源:Festo)

图片说明:Festo 可为搬运系统和控制技术创造能源优化解决方案。提供直接安装且通过全面预测试的轻型搬运系统,如高速搬运单元三脚爪 EXPT 或高速
H 型门架 EXCH 可直接交付用户使用。(图片来源:Festo)
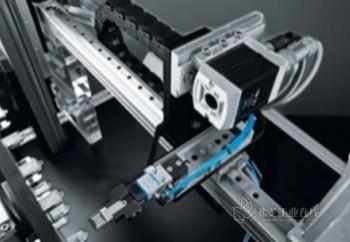
图片说明:理想组合:电动齿带驱动轴 ELGA 确保高速行进。智能视觉系统 SBOI-Q 负责操作的精度。它确定实际操作点,并确保所传送货物的精确定位。(图片来源:Festo)

图片说明:简化操作、更快捷、更便宜: 无需相当昂贵的精确主轴,搬运系统门架采用齿带驱动轴和摄像头。(图片来源:Festo)

图片说明:
带运动控制的预组装机器人解决方案:高速解决方案,如 H 型门架和 T 型门架以及三脚爪现已成为可能。(图片来源:Festo)
测试社区